ASEE Conference 2023 "The Star Spangled Defender" Autonomous Nerf Robot - Project Page
2023 -
tags: code design circuits
Task
My team was introduced to this project through our ENR 259 Engineering Design Lab class at Monroe Community College, where we were tasked with creating an autonmous robot that was capable of sequentially firing up to 25 Nerf Rival projectiles at an array of bucket and wall targets representing attacking british ships in a small scale re-creation of the Battle of Baltimore. Our project followed the ASEE Model Design Competition spec and required the unit to remain fully within with pentagon at all times while firing the Nerf projectiles through the air reliably and repeatably.
Design
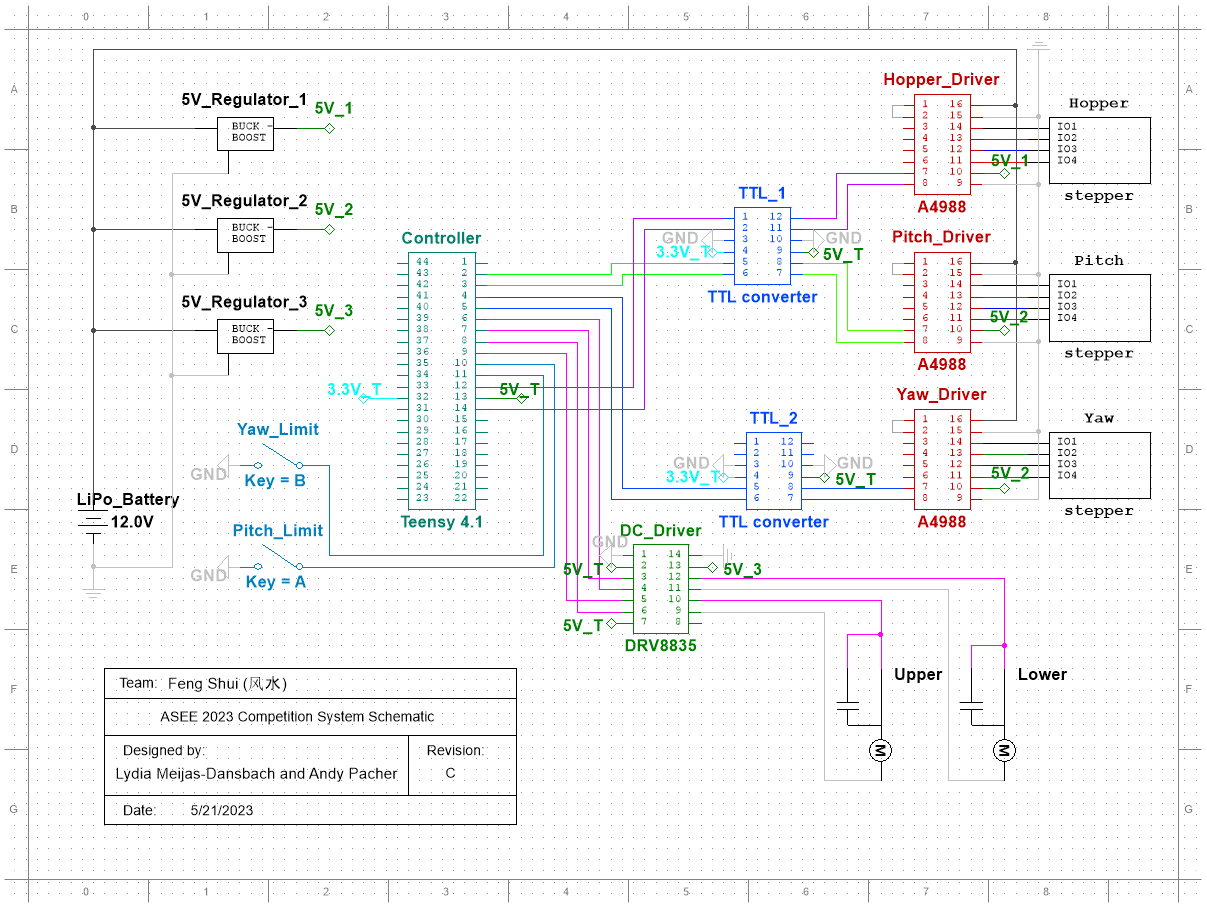
Our initial designs centered around a firing mechanism with two flywheels driven by DC electric motors and inclined up and down with a stepper motor. The ball storage and feed mechanism went through many iterations though the final design was an open-top hopper with a paddle-wheel driven by a micro stepper motor. The system circuit centered around a Teensy 4.1 micro-controller with DC motor and stepper driver IC chips on a breadboard powered by a LiPo battery and the entire assembly sat on a 3D printed rotating base with a stepper motor for rotational aiming control.
As the Electrical Systems manager I largely designed and built the system circuit through sevral iterations using MultiSim to simulate the circuit which was then prototyped on a breadboard before being solderd and built on a through-hole PCB. I also wrote a significant portion of the code in C and designed and printed several models using SolidWorks throughout the design process. The code is available on my GitHub
Result
During the semester we had three testing milestones to reach for our ENR 259 class and we achieved all three successfully by the testing date. Based on our performance, our team was selected to represent MCC at the ASEE Conference in Baltimore where we competed and scored 2nd in the expo and 6th overall.